Where we are at 23/3/2020 with 1802 project.
Have 1802 hooked up to Arduino Mega2650 and running little programs that, for instance turn Q LED on and off. Very slow clock goes about 10Hz.
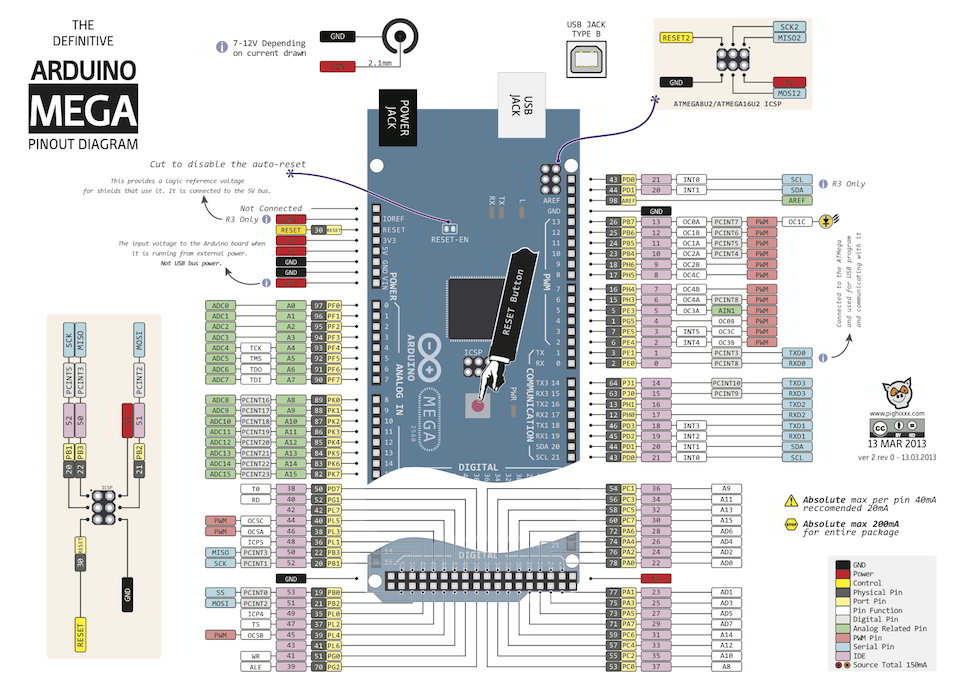
1802 Connect to Arduino Mega
The pin connections are given in next two pictures.
The program and the serial output that flicked Q led up and down.
Movie of Mega/1802 combination.
Big green LED, closest to camera is Q pin of 1802.
Big red and yellow LEDS on bread board are MA0, and MA1 respectively. (Address lines 0,1)
Little flashing LED on mega reflects clock being fed into 1802 from Pin13=PB7.
Note, program being sent is in vRAM array:
byte vRAM[256] = {0x7b, 0x7a, 0x7b, 0x7a, 0x30, 0x00,0x00};
Here, 0x7b is SEQ and 0x7a is REQ, ie. LED on and off respectively.
0x30,0x00 is 1802 code for BR Start, ie BR 00 ie branch to start at 0x00.
The final 0x00 is never executed but stands for IDL, idle.